Methodology
Overview of the proposed PENN framework.
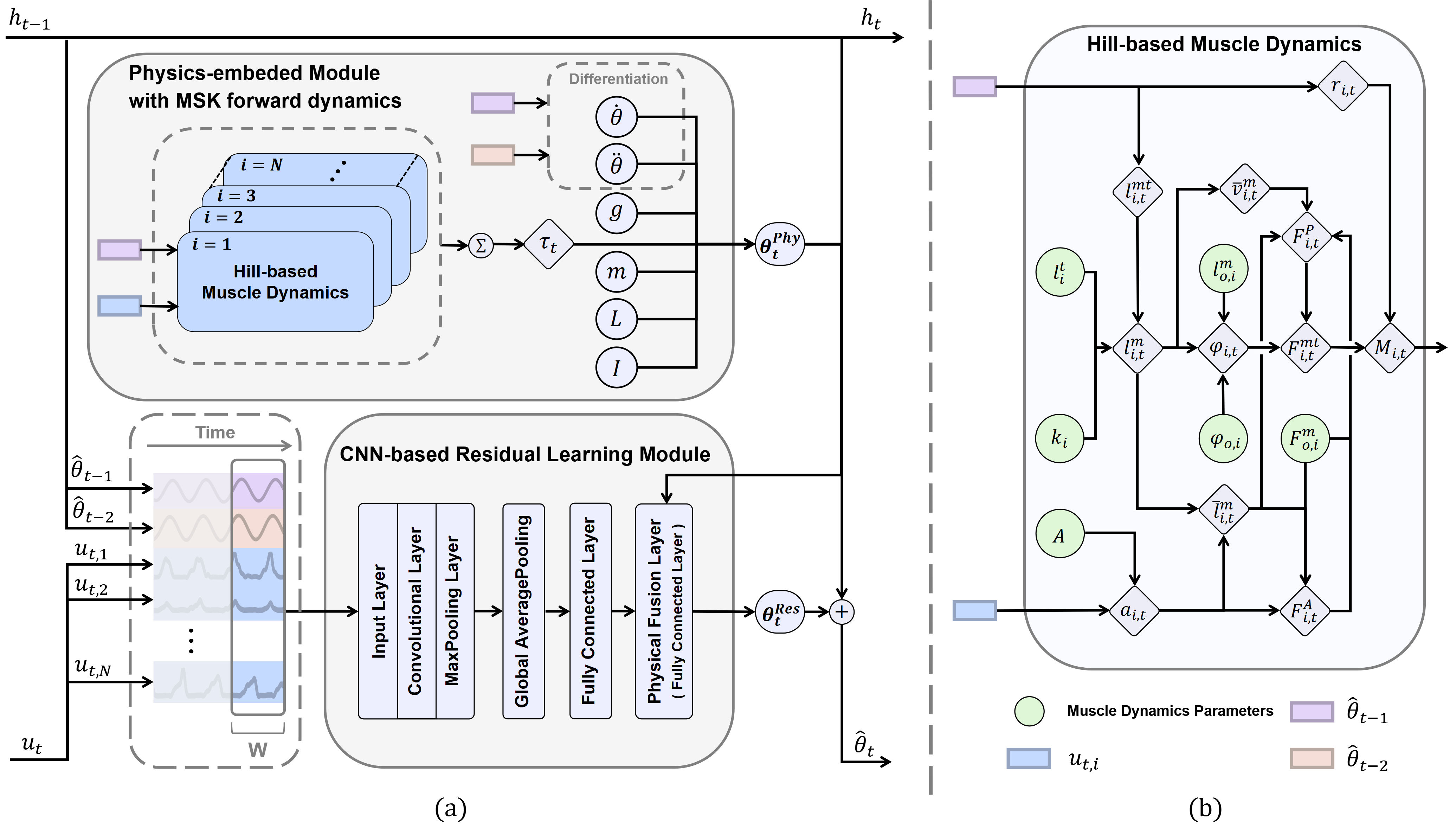
The PENN framework proposed in this paper adopts a hybrid architecture, comprising a physics-embedded module and a CNN-based residual learning module. In the physics-embedded module, MSK forward dynamics are integrated to provide physiologically inconsistent motion estimation. The CNN-based residual learning module captures nonlinear residuals that the physics-embedded module cannot model, effectively bridging the gap between MSK forward dynamics and the complex EMG-to-kinematics mapping. It adopts a recursive temporal context integration strategy, where pre-processed sEMG signals at the current time step and historical estimations of joint angles at the previous two time steps are input into the recursive structure unit. Then, the current output of the physics-embedded module is incorporated into the physical fusion layer (a fully connected layer) to enhance residual learning.
This module leverages a Hill-based forward dynamics model to generate an intermediate estimate $\theta^{Phy}_{t}$ using previous estimates $\hat{\theta}_{t-1}$, $\hat{\theta}_{t-2}$ and pre-processed sEMG signals $u_{i,t}$, where $t$ is the time step and $i=1,\cdots,N$ is the index of the muscle. The Hill-based forward dynamics model in this paper includes Hill-type muscle models (muscle activation models, muscle-tendon dynamics models) and a joint dynamics model. Hill-type muscle models are widely used in model-based approaches to describe the sEMG-force relationship for individual muscles. To reduce numerical stiffness in the muscle-tendon dynamics model, we assume the tendon to be rigid, which implies that the pennated muscle element, comprising a contractile element in parallel with a passive elastic element, is connected to an inextensible tendon element. The following provides a detailed explanation of the Hill-based forward dynamics model.